Caratteristiche Elettriche
Isolamento
L’avvolgimento dello statore è eseguito con filo di rame smaltato (classe H-200°C) con resine poliesterimidiche modificate con top di resine amide-imidiche ed è caratterizzato da un trattamento di impregnazione con resine alchiliche modificate di alto pregio in classe F delle migliori marche nazionali, che garantisce una elevata protezione alle sollecitazioni elettriche e meccaniche. L’avvolgimento quindi si presenta compatto, privo di sacche d’aria e con un elevato coefficiente di dispersione del calore. I restanti materiali impiegati nella realizzazione di serie dei nostri avvolgimenti sono in classe F: a richiesta possiamo fornire avvolgimenti totalmente in classe H.
Tensione frequenza
È ammessa una variazione massima della tensione pari al 5% del valore nominale. In questo intervallo di funzionamento i nostri motori forniscono la potenza nominale. Nel funzionamento continuo, ai limiti di tensione sopraindicati, si può avere un aumento della sovratemperatura limite di 10°C max. Gli avvolgimenti “normali” sono calcolati per tensioni di 230V e 400V con frequenza di 50 Hz. A richiesta si possono fornire anche tensioni e frequenze diverse.
Tipi di Servizio per i motori elettrici
Quando l’acquirente ordina dei motori, ne deve
dichiarare il tipo di servizio. Questi sono i tipi di servizio
normati di uso più comune:
CODICE: S1
NOME: Servizio continuo
DESCRIZIONE: Una volta partito, il motore lavora con un carico costante fino almeno al raggiungimento dell’equilibrio termico. Il motore può quindi funzionare per un tempo illimitato.
APPLICAZIONI TIPICHE: Pompe idrauliche, ventilatori industriali, soffianti
ABBREVIAZIONE & ESEMPI: S1
CODICE: S2
NOME: Servizio di durata limitata
DESCRIZIONE: Una volta partito, il motore lavora con un carico costante per un periodo limitato durante il quale non viene raggiunto l’equilibrio termico. Il motore verrà alimentato una seconda volta quando la sua temperatura sarà scesa al livello della temperatura ambiente (son state ripristinate le condizioni iniziali).
APPLICAZIONI TIPICHE: Elettrodomestici come asciugacapelli, frullatori, eccetera
ABBREVIAZIONE & ESEMPI: S2 + durata del servizio / S2 30 min
CODICE: S3
NOME: Servizio intermittente periodico
DESCRIZIONE: Sequenza di cicli di funzionamento uguali composti da un periodo di funzionamento a carico costante ed un periodo senza carico e senza alimentazione elettrica. La corrente di avviamento non influenza l’innalzamento di temperatura del motore.
APPLICAZIONI TIPICHE: Motori per il sollevamento
ABBREVIAZIONE & ESEMPI: S3 + rapporto di intermittenza* / S3 25 %
CODICE: S6
NOME: Servizio ininterrotto periodico
DESCRIZIONE: Sequenza di cicli di funzionamento uguali composti da un periodo di funzionamento a carico costante ed un periodo di funzionamento senza carico, durante il quale il motore continua a rimanere alimentato.
APPLICAZIONI TIPICHE: Macchine per il taglio del legno, pompe per circuiti oleodinamici
ABBREVIAZIONE & ESEMPI: S6 + rapporto di intermittenza* / S6 40 %
* Se non diversamente specificato, la durata di un ciclo per i servizi S3 e S6 è di 10 minuti e i rapporti di intermittenza dovranno assumere un valore tra i seguenti: 15 %, 25 %, 40 %, 60 %. L’acquirente può comunque richiedere un tipo speciale di servizio, non normalizzato, secondo il reale ciclo di funzionamento del motore. Se l’acquirente però non dichiara il tipo di servizio in sede di ordine, gli sarà fornito un motore con servizio S1. I tipi di servizio S2, S3 e S6 hanno tutti un tempo di riposo (cioè senza carichi esterni applicati) durante il quale il motore ha tempo di raffreddarsi, permettendo così di sovraccaricarlo rispetto a quando lo stesso è utilizzato con un servizio S1 (e quindi ininterrottamente sotto carico). Inoltre i motori con servizio diverso da S1 non sono inclusi nel regolamento europeo riguardante i motori ad alta efficienza. Quindi scegliere il tipo di servizio corretto significa acquistare un motore che soddisfa le reali esigenze dell’applicazione dove verrà installato, evitando di comprare un motore sovradimensionato e consentendo un risparmio immediato. Per ulteriori informazioni si rimanda alla norma IEC 60034-1. In caso di dubbi il nostro ufficio tecnico sarà lieto di aiutarvi.
Schemi di collegamento dei motori
Il senso di rotazione è riferito al motore visto dal lato dell’albero.
La morsettiera è vista tenendo il lato albero del motore alla propria sinistra.
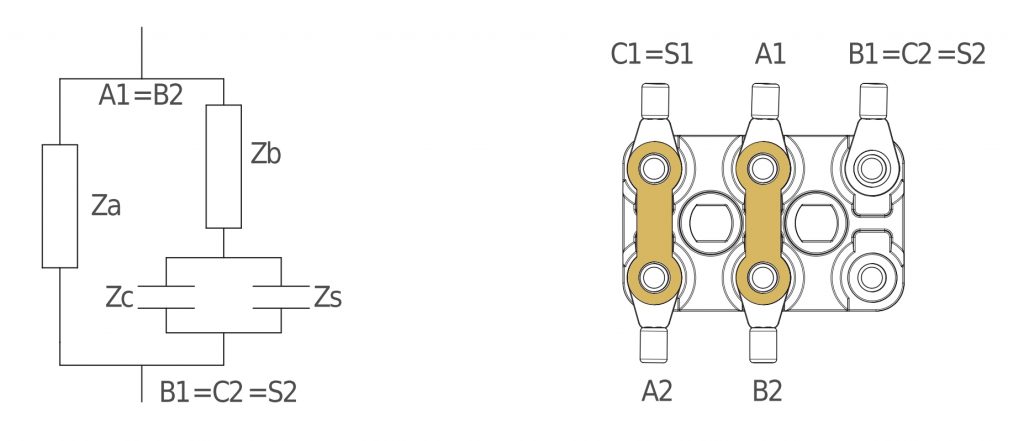
Motori monofase (con condensatore di spunto)
L’avvolgimento è composto da due fasi (Za e Zb), da un condensatore di marcia (Zc) e da un condensatore di spunto (Zs). Tutti e 4 i componenti hanno 2 terminali: A1, A2 per Za, B1, B2 per Zb, C1, C2 per Zc, S1, S2 per Zs.
L’alimentazione indicata in targhetta deve essere fornita tra A1 e A2.
Rotazione Oraria
Rotazione Antioraria
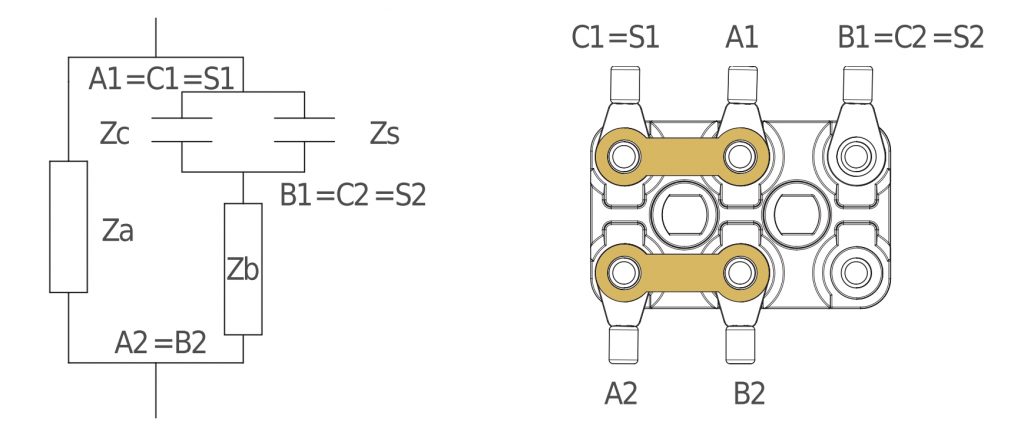
Motori bifase
L’avvolgimento è composto da due fasi (Za e Zb) e da un condensatore (Zc).
Tutti e 3 i componenti hanno 2 terminali: A1, A2 per Za, B1, B2 per Zb, C1, C2 per Zc.
La connessione tra A2 e B2 è effettuata all’interno del motore. L’alimentazione indicata in targhetta dev’essere fornita tra A2 e B1 oppure tra A2 e A1 per invertire il senso di rotazione.
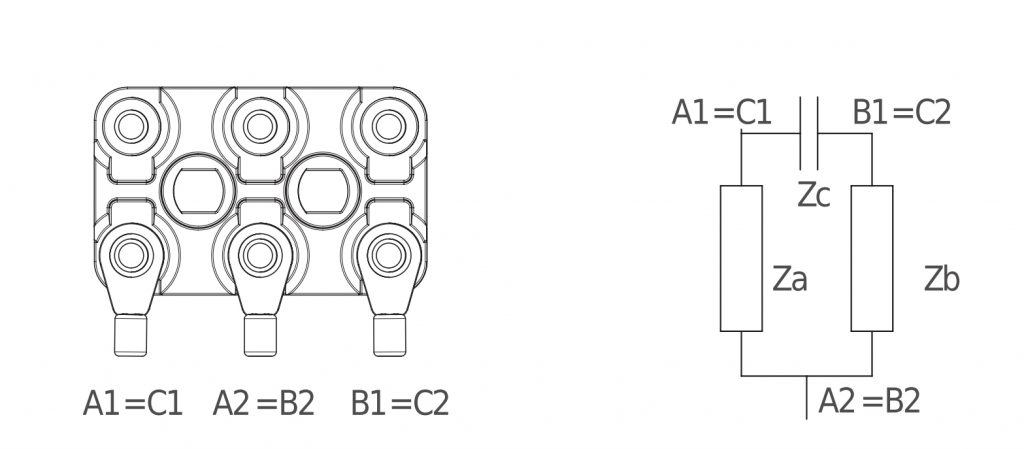
Motori trifase a singola velocità
L’avvolgimento è composto da tre fasi (Za, Zb e Zc). Tutti e 3 i componenti hanno 2 terminali: A1, A2 per Za, B1, B2 per Zb, C1, C2 per Zc. La tensione di alimentazione indicata in targhetta dev’essere fornita tra A1,B1 e C1. Per invertire il senso di rotazione è necessario invertire la posizione di 2 cavi di alimentazione.
Connessione a Stella
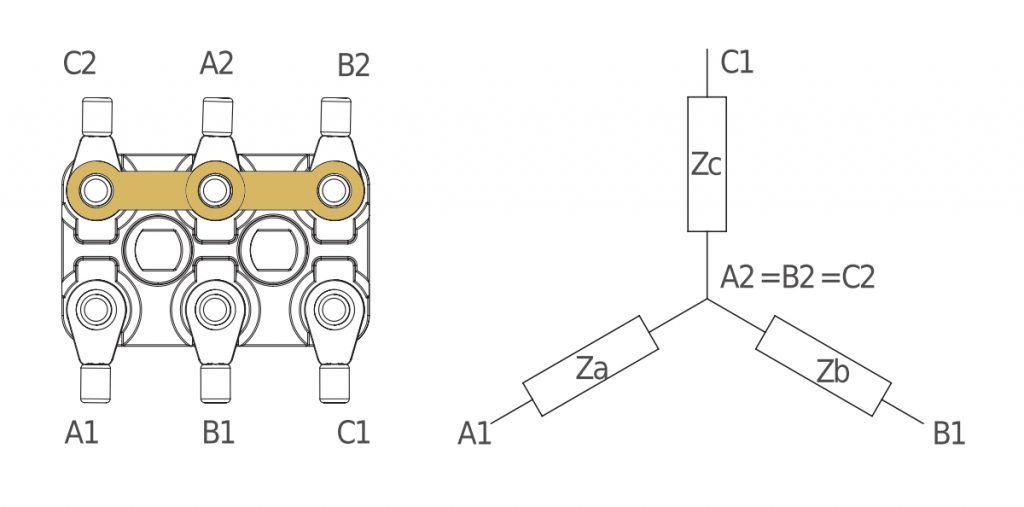
Il motore viene alimentato con la maggiore delle tensioni riportate in targhetta.
Connessione a Triangolo
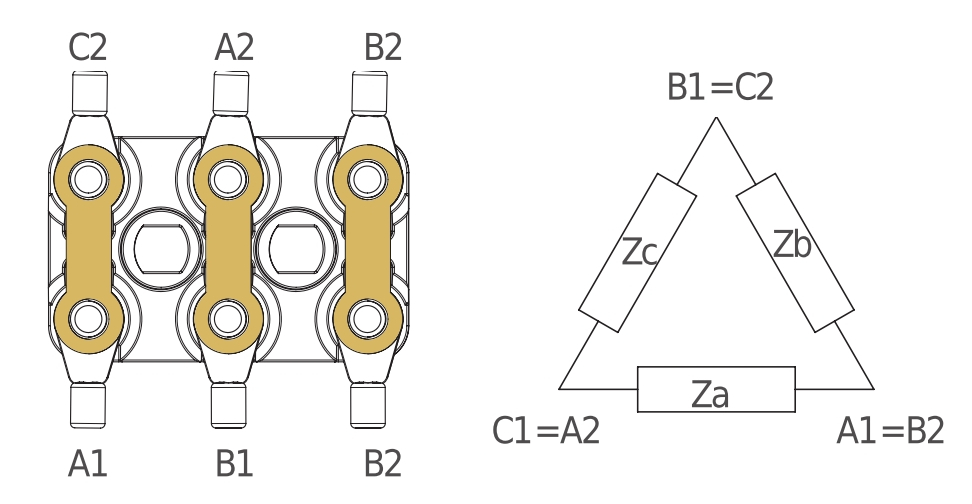
Il motore viene alimentato con la minore delle tensioni riportate in targhetta.
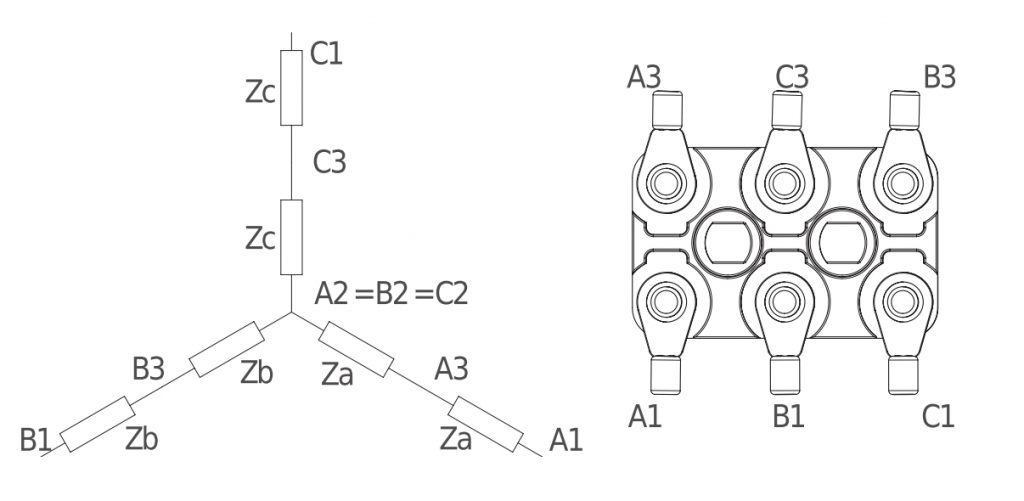
Motore doppia velocità, singolo avvolgimento Δ/YY
L’avvolgimento è composto da tre fasi (Za, Zb e Zc). Tutti e 3 i componenti hanno 2 terminali e 1 derivazione intermedia: A1, A2, A3 per Za, B1, B2, B3 per Zb, C1, C2,C3 per Zc. Per invertire il senso di rotazione in entrambe le velocità è necessario invertire la posizione di 2 cavi di alimentazione. Per mantenere il senso di rotazione del motore in entrambe le velocità si devono traslare i cavi di alimentazione tra A1=C2, B1=A2, C1=B2 e A3, B3, C3 senza invertirli.
Velocità bassa
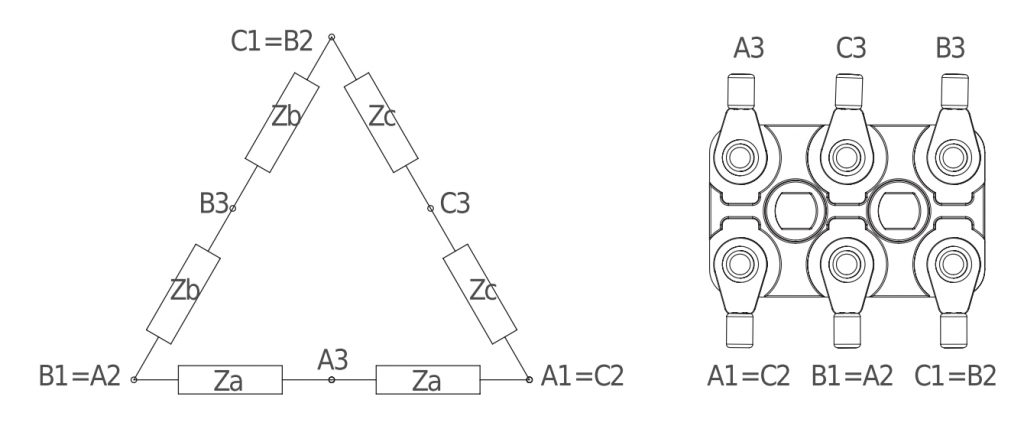
La tensione di alimentazione indicata in targhetta dev’essere fornita tra A1=C2, B1=A2 e C1=B2.
Velocità alta
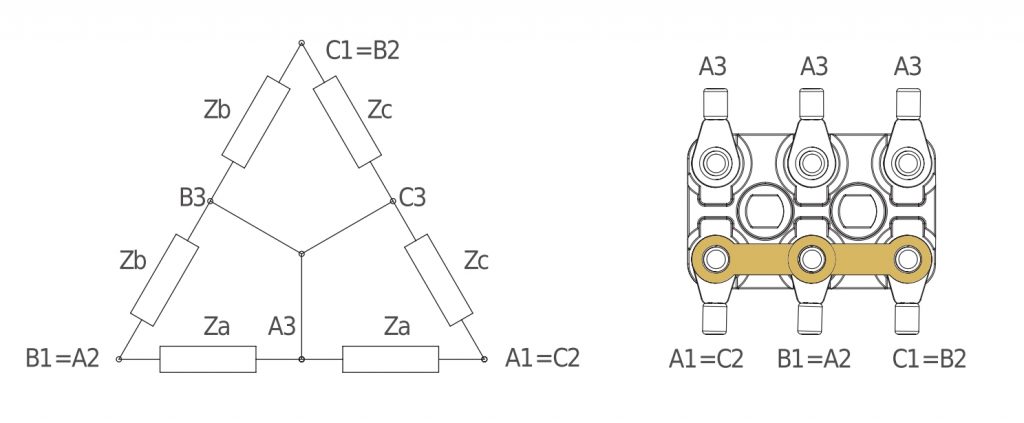
La tensione di alimentazione indicata in targhetta dev’essere fornita tra A3, B3 e C3.
Motore doppia velocità, singolo avvolgimento Y/YY
L’avvolgimento è composto da tre fasi (Za, Zb e Zc). Tutti e 3 i componenti hanno 2 terminali e 1 derivazione intermedia: A1, A2, A3 per Za, B1, B2, B3 per Zb, C1, C2,C3 per Zc. Per invertire il senso di rotazione in entrambe le velocità è necessario invertire la posizione di 2 cavi di alimentazione. Per mantenere il senso di rotazione del motore in entrambe le velocità si devono traslare i cavi di alimentazione tra A1, B1, C1 e A3, B3, C3 senza invertirli.
Velocità bassa
La tensione di alimentazione indicata in targhetta dev’essere fornita tra A1, B1 e C1.
Velocità alta
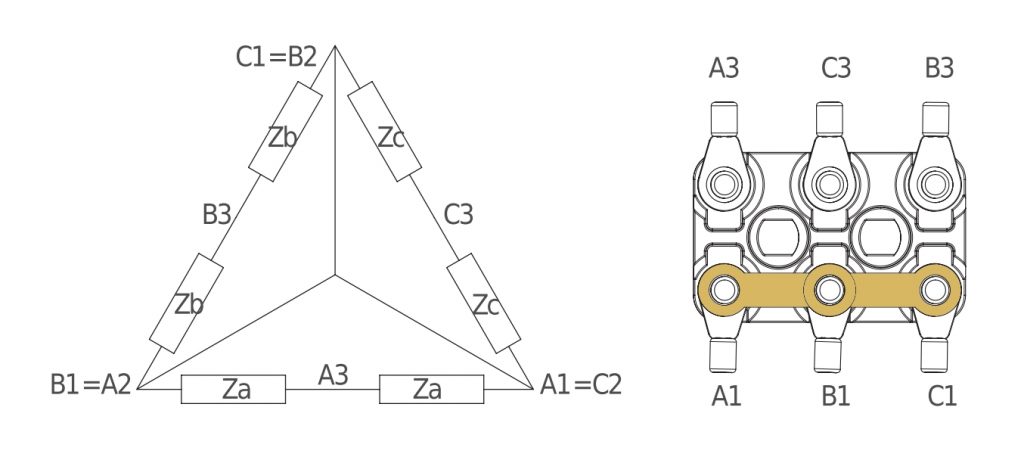
La tensione di alimentazione indicata in targhetta dev’essere fornita tra A3, B3 e C3.
Motori doppia velocità, doppio avvolgimento
Nel motore ci sono 2 avvolgimenti. L’avvolgimento della velocità bassa è composto da tre fasi (Za, Zb e Zc). Tutte e 3 le fasi hanno 2 terminali: 3 di questi terminali (uno per fase) sono connessi tra loro internamente al motore, per cui arrivano alla morsettiera 3 terminali, uno per fase: A per Za, B per Zb, C per Zc. L’avvolgimento della velocità alta è composto da tre fasi (Zd, Ze e Zf). Tutte e 3 le fasi hanno 2 terminali: 3 di questi terminali (uno per fase) sono connessi tra loro internamente al motore, per cui arrivano alla morsettiera 3 terminali, uno per fase: D per Zd, E per Ze, F per Zf. I terminali dei 2 avvolgimenti non devono essere in alcun modo collegati tra loro. Per mantenere il senso di rotazione del motore in entrambe le velocità si devono traslare i cavi di alimentazione tra A,B,C e D,E,F senza invertirli. Per invertire il senso di rotazione su una velocità è necessario invertire la posizione di 2 cavi di alimentazione.
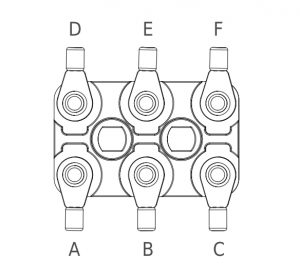
La tensione di alimentazione indicata in targhetta dev’essere fornita tra A,B e C nel caso si volesse adoperare la velocità bassa. La tensione di alimentazione indicata in targhetta dev’essere fornita tra D,E e F nel caso si volesse adoperare la velocità alta.
Motori trifase a tre velocità
Nel motore ci sono 2 avvolgimenti. L’avvolgimento che fornisce le velocità alta e media è un Dahlander del tipo n/2n o n/6. L’avvolgimento che fornisce la velocità bassa è un trifase a singola velocità.
Tali motori vengono forniti già cablati, senza morsettiera.
Dal motore escono 2 cavi: uno a 7 contatti numerati, 1-6 collegati all’avvolgimento Dahlander, il 7° per la messa a terra, uno a 4 contatti, 3 collegati all’avvolgimento trifase a singola velocità, uno per la messa a terra. Per gli schemi dei 2 avvolgimenti si rimanda alle schede precedenti.
Riassumendo:
per ottenere la velocità alta si deve alimentare 4,5,6 e cortocircuitare 1,2,3 del cavo a 7 contatti per ottenere la velocità media si deve alimentare 1,2,3 e tenere aperti 4,5,6 del cavo a 7 contatti per ottenere la velocità bassa si devono alimentare i 3 contatti del cavo a 4 contatti. Per mantenere il senso di rotazione del motore in entrambe le velocità alte si devono traslare i cavi di alimentazione tra 1,2,3 e 4,5,6 senza invertirli. Per invertire il senso di rotazione su una velocità è necessario invertire la posizione di 2 cavi di alimentazione. Non è possibile la scelta tra stella e triangolo nel trifase a singola velocità.
Dati elettrici motori di serie
I motori ELMOR® vengono testati al banco prova per la determinazione delle grandezze elettriche caratteristiche secondo la norma IEC EN 60034-1:2010-02. I valori ottenuti da tali prove vengono riferiti alla temperatura ambiente di 40°C e ad altitudine inferiore a 1000m sul livello del mare. Per condizioni di esercizio diverse da quelle specificate i dati caratteristici variano secondo il coefficiente indicato nel grafico sottostante.
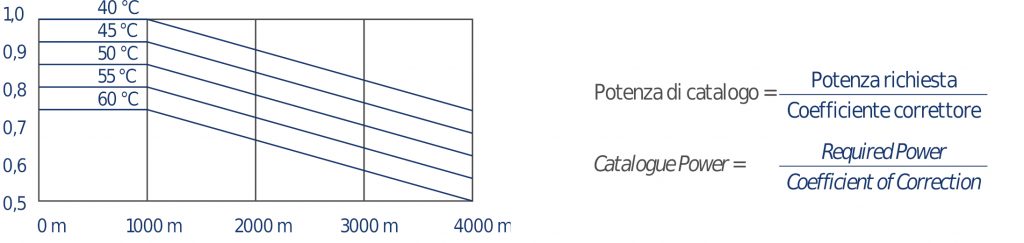
Coefficiente correttore di temperatura
Nelle tabelle a seguire vengono utilizzati i seguenti simboli:
la/ln = Corrente spunto/Corrente nominale | Ca/Cn = Coppia spunto/coppia nominale
I motori ELMOR® sono sottoposti ad un programma di continuo miglioramento, tramite prove al banco: i valori contenuti nelle seguenti tabelle, quindi, possono venire modificati senza preavviso e sono, per questo, non impegnativi per la MORATTO Srl.
Tensioni e frequenze di funzionamento
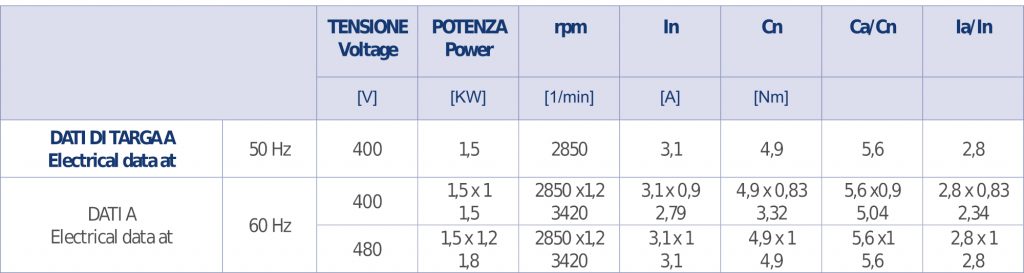
I motori ELMOR® sono progettati per funzionare anche a 60Hz: tensione e potenze variano in accordo con la seguente tabella. Su richiesta, possono venire realizzati avvolgimenti appositamente dimensionati per tensioni e frequenze speciali.
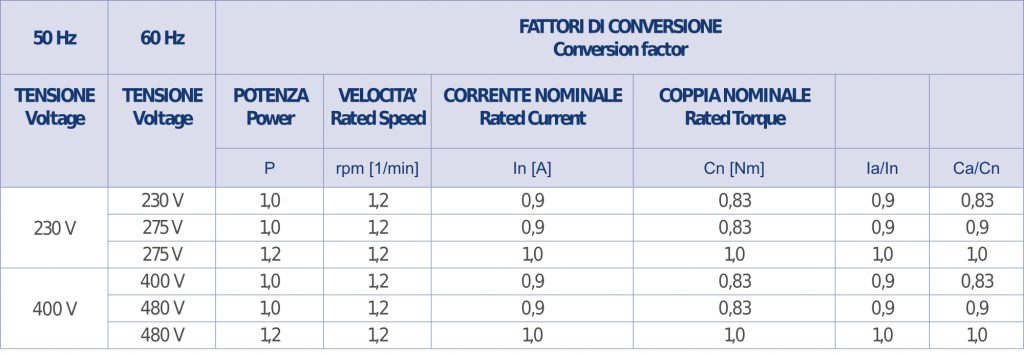
Esempio di conversione (valori approssimativi) | Example of applications (approximate values)
Motori creati su misura. Contatta l’ufficio progettazione. SCRIVICI


© 2018 MORATTO srl | Via A. Volta, 2 | Z.A. Pero | 31030 Breda di Piave | TV | Italia | tel. +39.0422.904032 | fax. +39.0422.90363
E-mail: moratto@moratto.it | Pec: morattosrl@morattopec.it | SDI: A4707H7 | Cookie Policy | Privacy Policy
P.Iva 02403160266 | Reg. Imp. Treviso - N.: 34572 | Cap. Soc.: 500.000 Euro i.v.